¶ General Description
Retrieve data from a specified CAN bus message and place it into the RXD buffer.
This function uses the RXD buffer
To use this function, the following configuration must be set in the device:
Configuration➜CAN Bus➜Connect CAN bus1
¶ Graphical Representation
| In the function menu | On the diagram |
|---|---|
 |
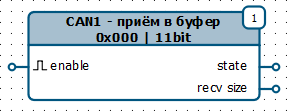 |
¶ Inputs
| Name | Value Type | Description |
|---|---|---|
enable |
bool |
Enable data reception |
¶ Outputs
| Name | Value Type | Description |
|---|---|---|
state |
int32 |
Receiver status: 0 — receiver off 1 — output data is not valid 3 — receiving data 4 — data overflow occurred 5 — settings not configured 6 — configuring settings 7 — settings configured -1 — function misconfigured or device resources unavailable -3 — timeout |
recv size |
int32 |
Number of bytes received in the RXD buffer |
¶ Status Transitions
0 -> 5 -> 6 -> 7 -> 1 -> 3 -> -3
|
* -> 4 -> -3
[0 .. 7] -> -1 // Transition to error is possible from any status
¶ Settings
| Name | Description |
|---|---|
| Bus | CAN interface used:CAN1CAN2 |
| Timeout, ms | If the timeout expires after receiving the specified message, any new message received will be written again from index 0 of the RXD buffer. |
| Identifier Size | Identifier type: 11 bit29 bitPGN |
| Identifier | Identifier value |
| RTR Packet | If enabled, the function will only accept messages with the RTR flag set |