¶ Preparation
For a list of supported vehicles, see the link
For vehicles not available in the list, CAN logging is required (see the guide)
When working with CAN bus, you should always use the latest firmware version of the device and the latest Configurator.
The latest firmware version can be found at this link.
The latest Configurator can be downloaded here.
¶ Configuration
¶ 1. Enable interface

¶ 2. Select the interface operation mode

Active mode allows the device to acknowledge messages in the CAN bus and send requests to it, but may lead to disruption of the CAN bus of the vehicle (allows you to get the maximum information, but use it with extreme caution).
Passive mode allows the device to only "listen to" the CAN bus without acknowledging messages and without sending requests to it. This cannot lead to problems on the vehicle (some information may not be available, because it appears on request).
By default, it is recommended to use the "Passive" mode.
This eliminates the risk of disrupting the vehicle's CAN bus.
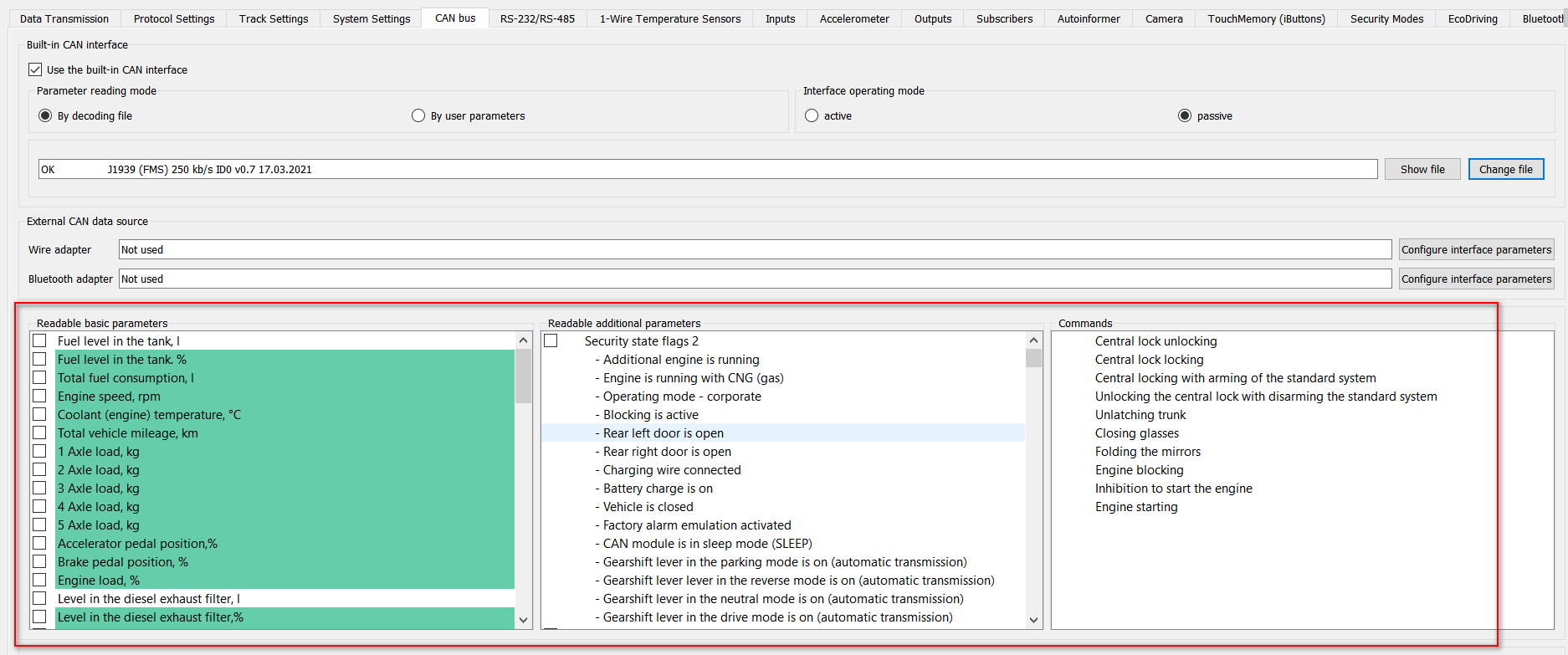
¶ 3. Selecting the decode file and saving it to the device
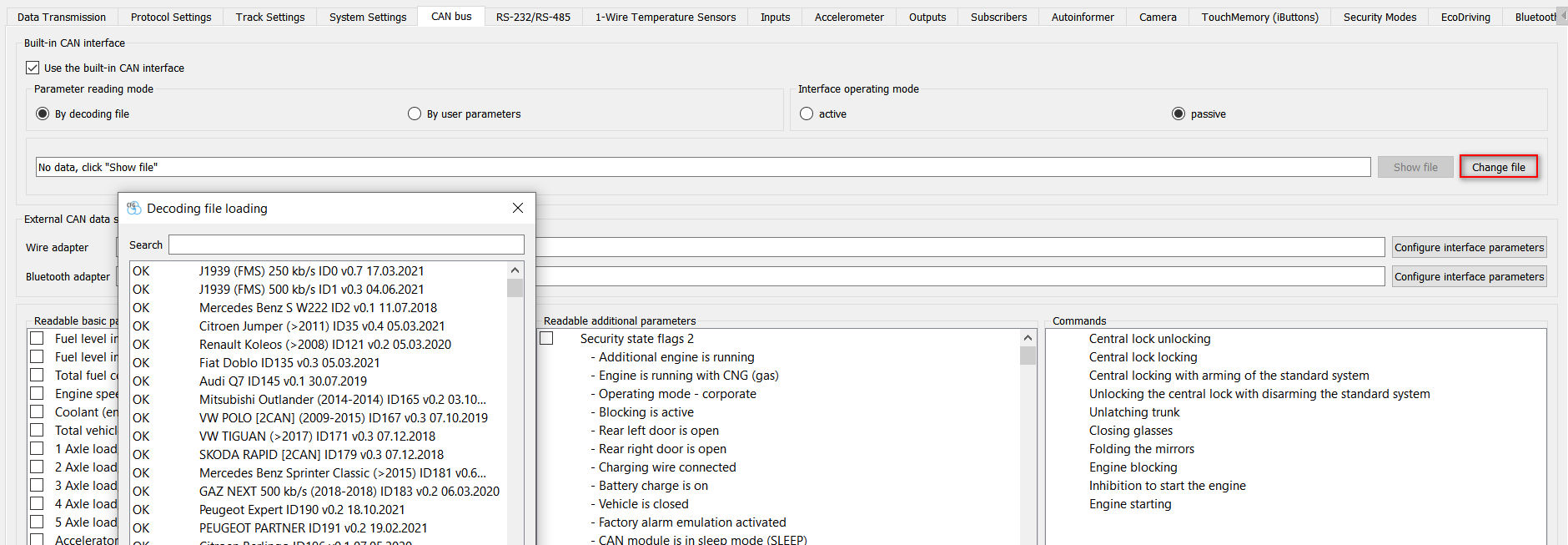
By highlighting, you can see what functionality is provided in decode file
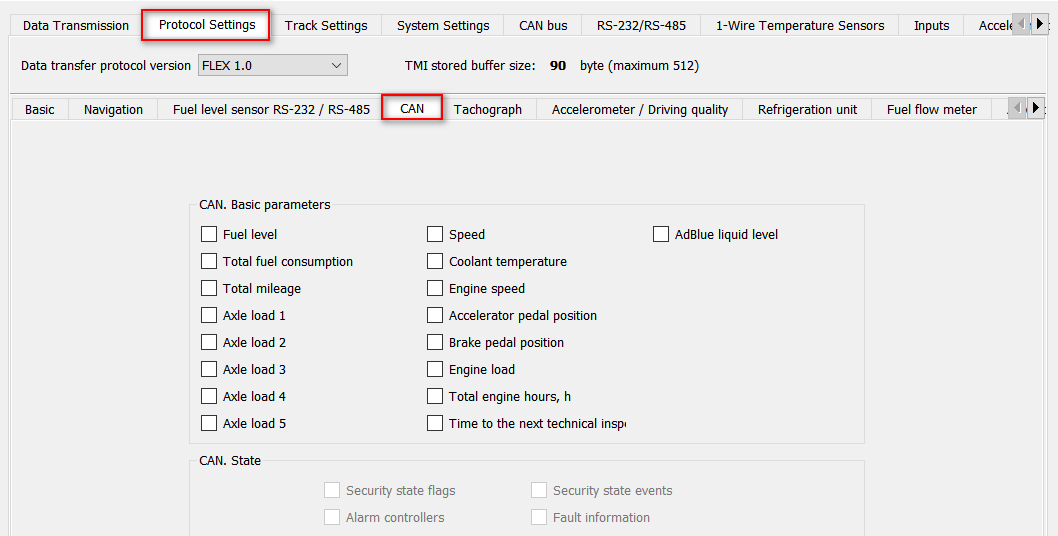
¶ 4. Protocol settings
Select the parameters to be sent to the monitoring platform (the maximum set of parameters is only available in FLEX 3.0)