¶ Configuration
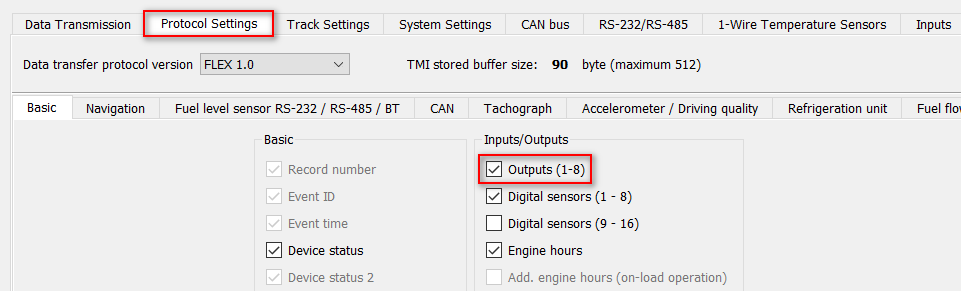
To transmit the outputs status to the tracking platform, you must tick the corresponding parameter in the protocol settings.
¶
To control the output by command, you must set up the selected output (O2 is shown in the example):
| Setting | Value |
|---|---|
| Use as | general purpose |
| Nature of the signal | Continious |
| Safe blocking | Off |
| Delay before line activation | 0 sec |
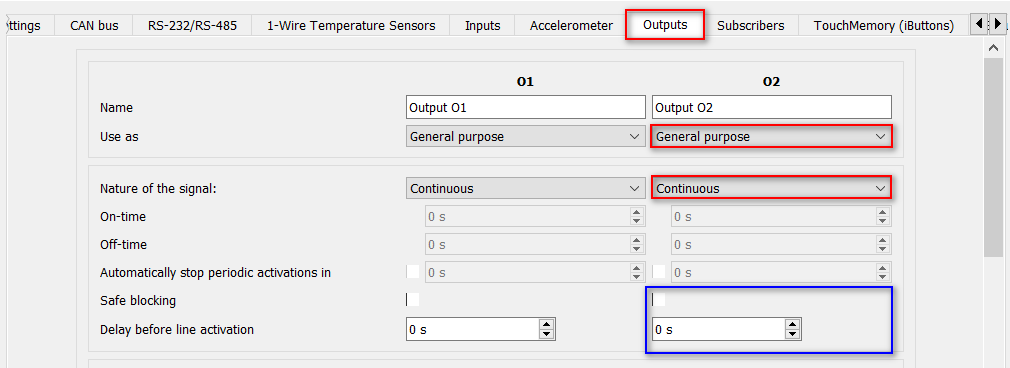
Safe blocking - if the parameter is ticked, then by command Activate, the corresponding output is activated only if the speed from the navigation receiver is less than 20 km/h.
If the navigation data is not reliable, then the speed is taken equal to 0 km/h.
That is, if navigation is lost while driving, the current speed will be set to 0 and blocking can be performed.
Command to activate the output is stored by the device until its execution or device first reboot.
Delay before line activation - if the parameter value is 0, then the output is activated immediately after receiving the Activate command, otherwise the output is activated only after the specified time period.
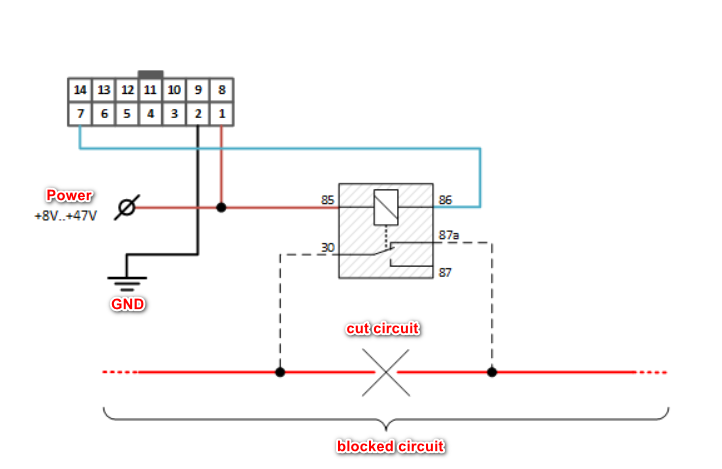
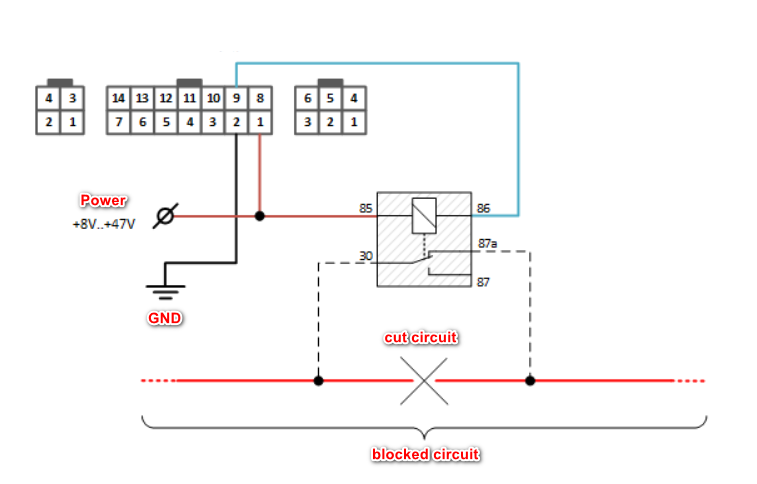
¶ Connection
When output triggers, GND appears on it.
When switched off, GND disappears on the outputs (ouput is in Z-state).
¶ Control
Status of the outputs is controlled by commands. Output control command allows to activate or disactivate one or more outputs at the same time.
¶ Request/Command
- Format:
*!SETOUT<s><num><new_state>,<num><new_state>... - Description:
<s>- parameter separator - space
<num>- number of the output to be changed. Numbering starts with 1.
<new_state>- output state to be set:
Y - activate;
N - deactivate.
Command allows to set the state of several outputs at the same time. The state of the outputs whose numbers are not specified in the command does not change.
- Example:
*!SETOUT 2Y
¶ Response
- Format:
*@SETOUT<s><result>,<num><cur_state>,<num><cur_state>... - Description:
<s>- parameter separator - space
<result>- command processing result :
OK - command executed;
FAIL - command execution error.
<num>- number of the output to be changed. Numbering starts with 1.
<cur_state>- current state of the output:
Y - activated;
N - deactivated. - Example:
*@SETOUT OK,2Y
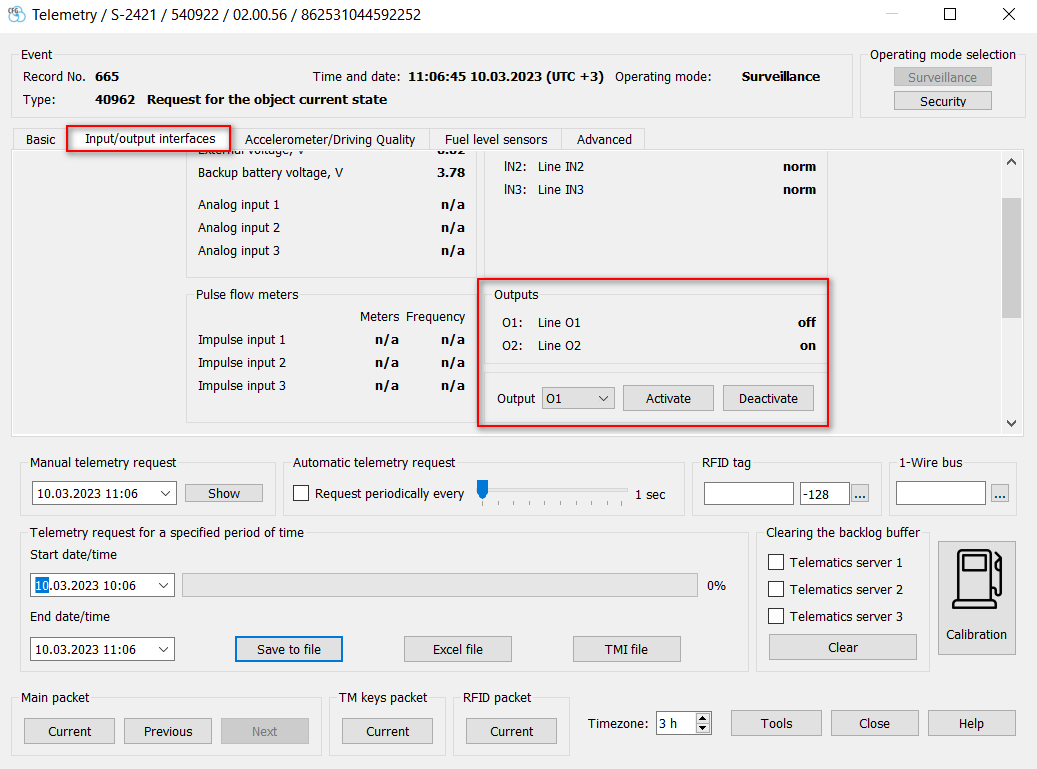
¶ Verification
To check the command operation, you can use the Telemetry window of the Configurator.