¶ Accelerometer
Device has virtual sensors based on the built-in accelerometer (three-axis acceleration sensor):
- Weak shock sensor SH1
- Strong shock sensor SH2
- Movement sensor SH3
- Tilt sensor SH4
These sensors can be used for notifications. Also, the accelerometer sensors are involved in the coordinate averaging algorithm during stops and the correct display of the track depends on its setting.
In addition to virtual sensors, accelerometer is used for such functions as EcoDrivng and Road accident detection.
For the correct operation of the EcoDriving and Road accident detection functions, accelerometer calibration must be performed after mounting the device on the vehicle.
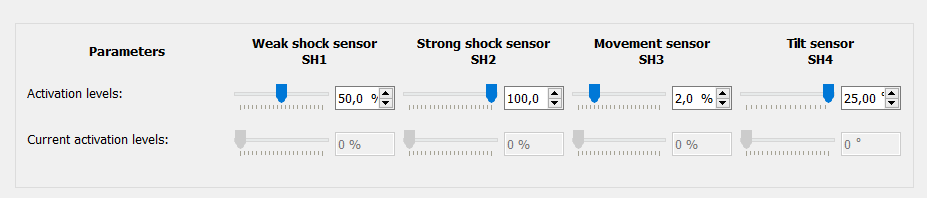
¶ SH1-SH4 Sensors
If it is necessary to use shock sensors, for their normal operation, the device should be installed on rigid body elements, closer to the central axes of the car, in order to ensure the most uniform sensitivity to impact on any part of the car body. The device must be securely fixed to avoid false triggers.
Setting up the weak and strong shock sensors consists of choosing such an optimal level of operation at which false triggers will not occur due to external background influences (wind, thunder, etc.), and clearly defined impacts on the car body will be determined unambiguously.
To select the optimal settings, you can request the values of the current maximum measured exposure levels from the device online by clicking on the Request values button.
When setting up, various parts of the car are sequentially carefully “tapped” and, according to the reaction, that is, according to the returned measured value, a decision is made at what level of sensitivity the response threshold should be set, comparing the current returned value with the set one.
The current trigger levels display the maximum values for the entire time of the device operation, therefore, between impacts on the body, it is necessary to press the Reset values button in order to receive the actual maximum values each time.
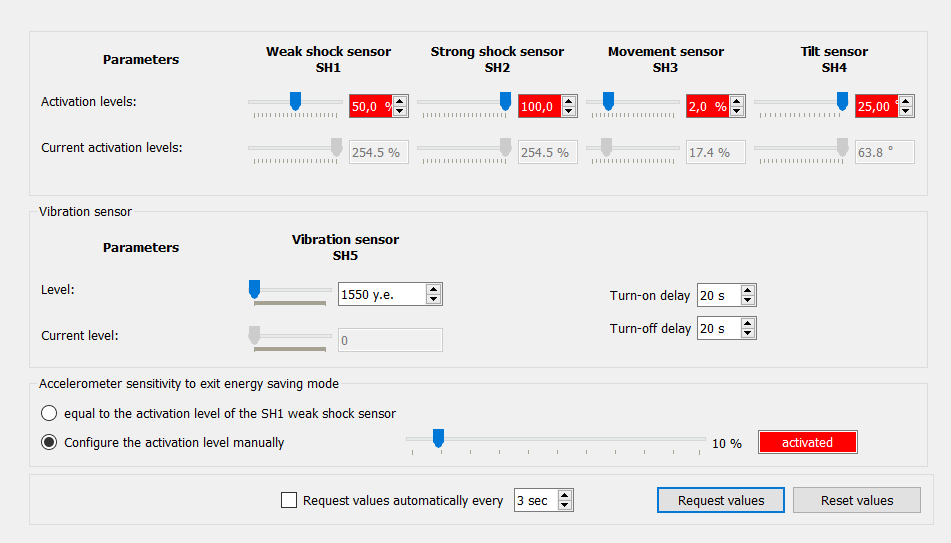
You can also use the automatic request for the shock sensor values, for this you should tick the checkbox Request values automatically every and select the desired update time.
Weak shock sensor SH1 and Strong shock sensor SH2 are designed to detect sudden impacts (shocks, shakes) of varying degrees of force.
Movement sensor SH3 is used to set coordinate averaging modes and set up vehicle motion sensor (detailed description on the Track Settings) tab. The sensor logic is configured to capture the accelerations specific to objects in motion.
If the SH3 sensor is used for averaging coordinates on stops, but at the same time there are coordinate outliers on the track, because the averaging mode is not turned on or sometimes turns off due to false triggers of this sensor, then you need to gradually increase the threshold value in increments of
0.5%.
The optimal level of the SH3 sensor for vehicles is2.0% when the device is running.
Tilt angle sensor SH4 is triggered when the vehicle position deviates from the initial position at rest, detecting unauthorized lifting of a parked vehicle onto a tow truck.
If it is not required to control impacts and tilts, it is recommended to disable them by setting the threshold value of
0% for SH1, SH2 and SH4 to avoid the formation of unnecessary events when these sensors are triggered.
Accelerometer sensivity to exit energy saving mode - this setting is required for the Energy saving function and only to exit from the Sleep mode (for a detailed description of the Energy saving mode, see the System Settings tab.
¶ Accelerometer Calibration
Calibration of the accelerometer axes is necessary for the correct determination of accelerations along the axes of the car, regardless of how the device is located in the car during installation. The calibration process starts either after sending an SMS command to the device, or by the command of the Calibration wizard in the Accelerometer tab of the NTC Configurator program when connected via USB or remotely via the Internet.
If the accelerometer has not been calibrated, then the algorithms for fixing the exceeding of the acceleration and deceleration thresholds, as well as accident detection will not work.
In telemetry, the values of maximum accelerations for the period will be zero until the end of the calibration.
Any accelerometer calibration algorithm consists of two steps: static calibration to determine the vertical axis and dynamic calibration to determine the direction of the longitudinal axis.
-
During the static calibration, vehicle must be on a flat horizontal surface and be motionless for ~30 seconds.
After successful completion of this stage, the device automatically proceeds to the dynamic calibration stage. -
Dynamic calibration can be done in two ways:
- According to GNSS data from the navigation module
- Offline calibration
GNSS calibration is going during normal vehicle trips for some amount of time, from tens of minutes to several hours, depending on the intensity of acceleration and braking on straight sections of the road, at speed of more than 20 km/h.
If the calibration is not completed during one trip, it will continue during the next trip, even if the device is rebooted due to a power outage or remote configuration change.
Offline calibration allows you to quickly calibrate the device, but on condition that there is a straight free section of the road on which you can perform a series of several sharp accelerations and braking on the car strictly in a straight line.
With this method, it is necessary to start moving within ~30 seconds after the end of the static calibration.
¶ GNSS calibration
This calibration option is the most accurate and is recommended for using the device to record accident profile files or to accurately assess driving performance.
Before calibrating the accelerometer axes, make sure that the following conditions are met:
- device is securely fixed on a rigid part of the vehicle, whose movement is excluded;
- vehicle is located on a straight horizontal section of the road;
- vehicle has no body roll relative to the wheel axles due to suspension failures, etc.
- (optional) connection to the configurator via USB or remotely via the Internet is established (relevant during calibration using the NTC Configurator program, if you send calibration commands, this item is not necessary).
¶ With NTC Configurator
It is necessary to launch the calibration wizard in the tab Accelerometer -> Vehicle axes calibration, for this you need to press the button Request calibration information , and then Launch calibration wizard , where to select the item Calibration of the accelerometer axes based on GNSS data.
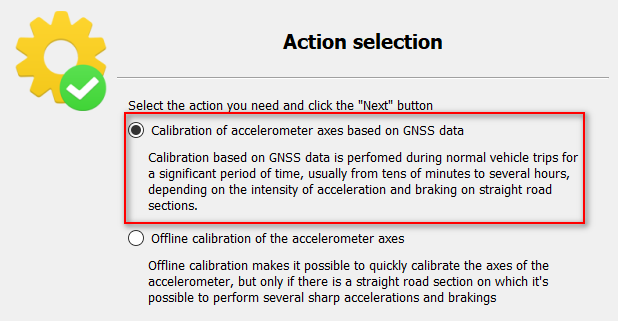
To start the process, you must click the Next button and follow the instructions in the calibration wizard window.
¶ With SMS command
To start GNSS calibration you need to send following SMS command:
CALIB ACL G
In response, the device will send an SMS with the text
Статическая калибровка начата - Static calibration started
After that for 60 seconds vibrations and impacts on the body and parts of the vehicle should not be allowed.
After successful completion of the static calibration stage, the device will send an SMS with the text:
Динамическая калибровка начата – Dinamic calibration started
At this stage, the calibration will continue during the start of the movement after reaching a speed of over 20 km/h. Depending on the intensity of acceleration and braking on straight sections of the road, GNSS calibration will be completed after some time from tens of minutes to several hours.
After successful completion of the dynamic calibration stage, the device will send an SMS with the text:
Калибровка завершена - Calibration completed
If the device has been rebooted since the calibration command was sent, then the calibration completion SMS message will not be sent to the sender of the command, because the device will "forget" the sender's number.
Resetting the device does not affect the calibration process - resetting DOES NOT cancel the calibration.
Possible errors during calibration:
- failed to measure the force of gravity;
- vehicle was moving or vibrating strongly (make sure that the engine is not running and there are no vibrations or impacts on the body and parts of the vehicle).
- failed to calibrate with GNSS data.
¶ Offline calibration
Before offline calibration of the accelerometer axes, make sure that the following conditions are met:
- device is securely fixed on a rigid part of the vehicle, whose movement is excluded;
- vehicle is located on a straight horizontal section of the road;
- vehicle has no body roll relative to the wheel axles due to suspension failures, etc.
- length of the road section is sufficient to perform 2-3 sharp accelerations and braking without changing the direction of movement;
- engine is off
- (optional) connection to the configurator via USB or remotely via the Internet is established (relevant during calibration using the NTC Configurator program, if you send calibration commands, this item is not necessary).
¶ With NTC Configurator
It is necessary to launch the calibration wizard in the tab Accelerometer -> Vehicle axes calibration, for this you need to press the button Request calibration information , and then Launch calibration wizard , where to select the item Offline calibration of the accelerometer axes.
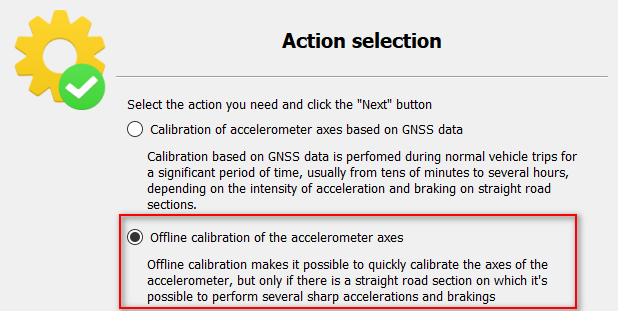
To start the process, you must click the Next button and follow the instructions in the calibration wizard window. If the calibration is successfully completed, it is recommended to perform a calibration check by following the steps described in the calibration wizard when selecting the Accelerometer axes calibration check item.
¶ With SMS command
To start offline calibration you need to send following SMS command:
CALIB ACL S
In response, the device will send an SMS with the text
Статическая калибровка начата - Static calibration started
After that for 60 seconds vibrations and impacts on the body and parts of the vehicle should not be allowed.
After successful completion of the static calibration stage, the device will send an SMS with the text:
Динамическая калибровка начата – Dinamic calibration started
Immediately after that, it is necessary to start the engine and make an intensive acceleration followed by a sharp braking successively 2-3 times in a row without changing the direction of the vehicle.
In case of successful completion of the dinamic calibration, the device will send an SMS with the text:
Калибровка завершена - Calibration completed
If the static calibration fails, the following errors may occur:
- failed to measure the force of gravity;
- vehicle was moving or vibrating strongly (make sure that the engine is not running and there are no vibrations or impacts on the body and parts of the vehicle).
If dynamic calibration fails, the following error messages may appear:
- vehicle did not pull away (make sure that the vehicle pulled away, picked up speed of at least 1 km/h to calibrate the accelerometer axes and at least 5 km/h to check it);
- insufficient acceleration/deceleration (make sure that at least 2 hard accelerations and decelerations have been done).
¶ Calibration check
Check may only be required for the Offline calibration mode.
For the GNSS calibration mode no checking is required.
Checking the calibration of the accelerometer axes is necessary to determine the correctness of the previously performed calibration. The check is carried out every time after calibration and in case the device has been re-mounted, or removed and re-mounted on the vehicle.
Checking the calibration of the accelerometer axes consists of two steps:
- Static calibration
- Dinamic calibration
During the static check, the vehicle must be motionless for 1 minute. During the dynamic check, it is necessary to pull away and pick up speed of at least 5 km/h. The dynamic check phase begins immediately after the static calibration check.
¶ With SMS command
To start calibration check you need to send following SMS command:
CALIB ACL С
Possible responses:
calibration is correctit is necessary to repeat the calibration
Possible errors:
- vehicle was moving or vibrating strongly (make sure that the engine is not running and there are no vibrations or impacts on the body and parts of the vehicle).
- vehicle did not pull away (make sure that the vehicle pulled away, picked up speed of at least 1 km/h to calibrate the accelerometer axes and at least 5 km/h to check it);
¶ Helpful SMS commands
Complete list of commands for working with calibration is given in a separate quide in the "Commands and requests" section.
Command to request information about the current state of the calibration:
CALIB ACL ?
Command to cancel the process of the started calibration:
CALIB ACL R
Command to reset the current calibration:
CALIB ACL E
¶ Accident Detection
If the device has generated accident profile and overwriting protection has not been removed, then it will be impossible to update the device firmware.
Device allows you to detect the accident based on data from the accelerometer. It is possible to set two severity thresholds: minor accident and severe accident.
When minor accident is detected, the device generates an event with the corresponding code and subsequently sends it to the GPS server (no more actions are performed).
When severe accident is detected, the device:
- Generates an event with the corresponding code and subsequently sends it to the GPS server.
- Writes to the non-volatile memory of the device accident profile (detailed description of the file with the accident profile is given later in the guide).
Events related to the accident detection:
| Code | Meaning |
|---|---|
41016 |
Command/request to the accident detection module (removing protection from the file) |
41017 |
Accident detection: minor accident |
41018 |
Accident detection: severe accident |
41019 |
Completing generation of accident profile |
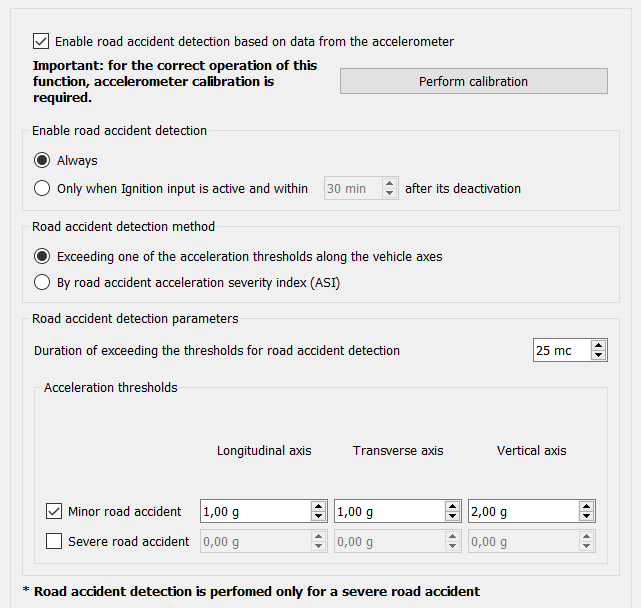
It is possible to determine the fact of the accident by two algorithms:
1. Exceeding one of the acceleration thresholds
Accident fact will be determined, provided that the acceleration values received from the accelerometer are recorded in excess of 1 g for 25 ms along the longitudinal or transverse axis, and/or 2 g for 25 ms along the vertical axis for a vehicle with the ignition on.
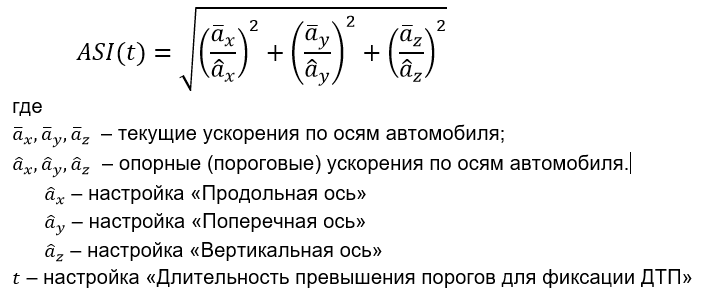
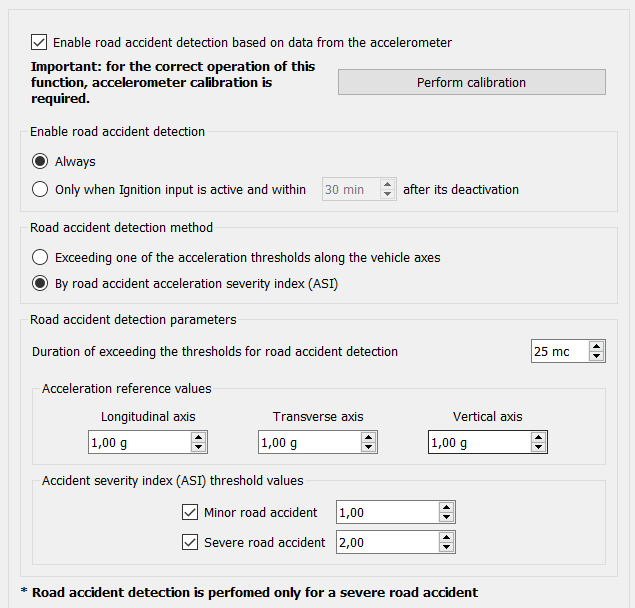
2. According to the Acceleration Severity Index (ASI)
This algorithm is recommended for those users who already had experience with devices that determined the severity of accidents using the
ASI15algorithm.
¶ Accident profile
If the device has generated accident profile and overwriting protection has not been removed, then it will be impossible to update the device firmware.
Only when detecting the fact of the severe accident according to any of the selected algorithms, the accident profile with information is saved in the device memory:
- acceleration values received at a frequency of 100 Hz for 3.5 s before and 3.5 s after the moment of the accident detection;
- speed values from the navigation module received at a frequency of 1 Hz for 30 seconds before and 30 seconds after the moment of of the accident detection.
This file will be stored in the device unchanged until it is uploaded to the server (if the server supports uploading such a files), or uploaded connecting to the NTC Configurator program with USB or remotely.
After uploading the accident profile to the server or to the NTC Configurator, the overwriting protection is removed, and the device will be able to save a new file when a new accident is detected.